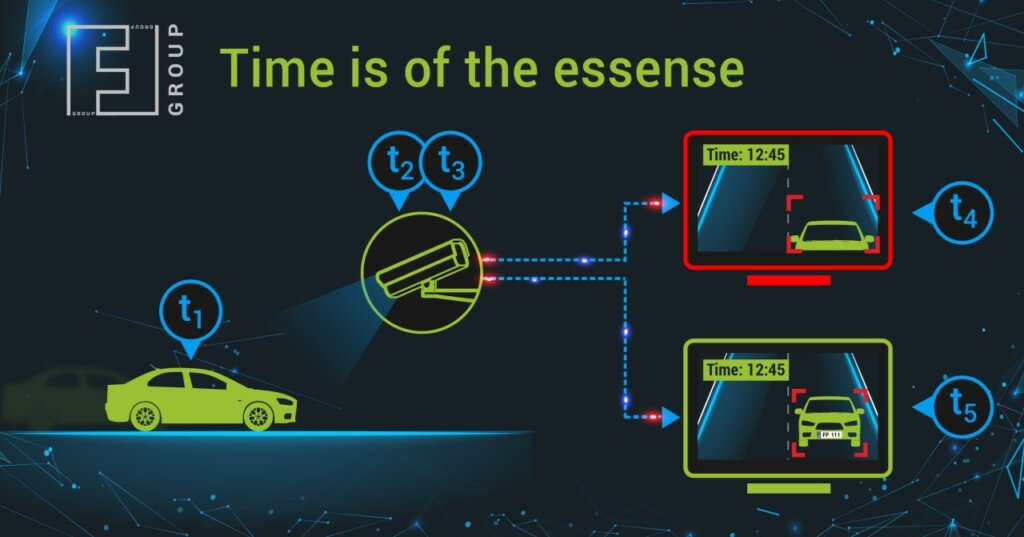
For the commercial success of on-camera solutions, customers need the right backend for data analysis. One of the open questions remains the correct synchronization of the number plate recognition time on the camera with the time it was received on the backend such as VMS. This recognition time difference should be milliseconds.
It seems to be just a fraction of a second (up to 100 millisecs per frame) and they have no effect on the processing of recognized vehicles in VMS. This error is only allowed for parking solutions, where the vehicle speed in the frame is low.
But it strongly affects the quality of vehicle recognition in heavy traffic with high traffic density.
Taking into account the issues described, integration should take into account the specifics of the recognition process both on the camera and on the server. This is the kind of knowledge that software manufacturers have, so creating the right plugin for integration is on their side.
Today our team is already compiling a trial demo, and putting it to the test it in a large project traffic in a European country.